迁移通知
本站内容正在逐步向 https://www.weiran.ink 迁移,更新内容请到新站查找。
HJ-WENO 方法读书笔记
《Level Set Methods and Dynamic Implicit Surfaces》
Level Set的核心思想是用数量场中的等值面表示几何曲面,求解 Level Set 的实质,还是是用数值方法求解一个微分方程。既然涉及到空间微分方程,绕不开的一个问题就是数值微分。最简单的中心差分由于数值震荡的原因无法使用,迎风格式很简单很有效然而精度不高。Level Set 计算中最常用的 WENO 差分格式,然而这格式实在比较复杂,加之网上找到的资料多为流体方程求解所用,花了不少力气才看懂。
Level Set 方程
$$ \phi_t + \vec{V} \nabla{\phi} =0 $$
其中
$$ \vec{V} = \{ u,v,w\} $$
在一维情况下展开为:
$$ \frac{{\phi}^{n+1}-{{\phi}^n}}{{\Delta}t} + u^n{{\phi}^n_x} = 0$$
可见,求解方程首先需要计算$${{\phi}^n_x}$$,即第n时间步上$${{\phi}_x}$$的数值。 为简单,下面定义$${{\phi}_{i}} = {{\phi}_{x_i}}$$
CFL条件
CFL条件用于控制空间步长与时间步长,保持数值稳定性。一般认为,满足下式时,数值求解是稳定的,误差不会扩大:
$$ \Delta{t} < \frac{\Delta{x}}{max\{ |u| \}} $$
令$\alpha = \Delta{t} \frac{max\{ |u| \}}{\Delta{x}}$.一般,保守的取值是使得 $ \alpha = 0.5 $,激进的优化中可以取到 $ \alpha = 0.9 $.
迎风格式
前向/后项差分
定义:
$$ D^+{\phi} = {\phi}^+=\frac{{\phi}_{i+1}-{{\phi}_i}}{{\Delta}x}$$ $$ D^-{\phi} = {\phi}^-=\frac{{\phi}_{i}-{{\phi}_{i-1}}}{{\Delta}x}$$
迎风格式的思想是与物理实际相结合,运动方向是哪边来的,就利用哪边的导数信息(或者主要利用哪边的),故有:
$$ {\phi}_{i}=\left\{ \begin{aligned} {\phi}^-_i &\qquad& u_i > 0\\ {\phi}^+_i &\qquad& u_i < 0 \end{aligned} \right. $$
至此,一切都很简单。
HJ-ENO格式
Hamilton Jacobi ENO格式,精度比上述迎风格式高,可以到三阶精度。ENO全称Essentially Nonoscillatiry,精选非震荡,听着有点像广告…… 三阶精度不稀奇,难度在于保证光滑性与数值稳定性。保证数值稳定性的思想仍是迎风的思想,根据$u$的符号侧重使用某一边的数值信息,但是ENO格式提高了对${\phi}^+$或者${\phi}^-$的估计精度;对于光滑性的保证,ENO格式的原则是:在临近节点中选择选择可以使得结果最为光滑的点,作为插值模板,构建公式。
差分定义
1.零阶,定义在网格点上: $$D^0_i{\phi}={\phi}_i$$ 2.一阶,定义在网格中间: $$D^1_{i+1/2}{\phi}=\frac{D^0_{i+1}{\phi}-D^0_{i}{\phi}}{\Delta{x}}$$ 3.二阶,定义在网格点上: $$D^2_{i}{\phi}=\frac{D^1_{i+1/2}{\phi}-D^1_{i-1/2}{\phi}}{2\Delta{x}}$$ 4.三阶,定义在网格点上: $$D^3_{i+1/2}{\phi}=\frac{D^2_{i+1}{\phi}-D^1_{i}{\phi}}{3\Delta{x}}$$
差分格式
构建${\phi}(x)$的牛顿插值多项式如下: $${\phi}(x) = Q_0(x) + Q_1(x) + Q_2(x) + Q_3(x)$$ 在$x_i$处对上式两边取导数,则有: $${\phi}'(x_i) = {Q_1}'(x) + {Q_2}'(x) + {Q_3}'(x)$$
$\phi^-_x$的情况
首先求一阶导数的估计,由于是 $\phi^-_x$的情况, 从$k=i-1$侧估计一阶导数,如下 : $$ Q_1(x) = (D^1_{k+1/2})(x-x_i) $$ $$ {Q_1}'(x) = D^1_{k+1/2} $$ 下面看$Q_2$,从牛顿多项式的形式上来讲: $$ Q_2(x) = c(x-x_k)(x-x_{k+1}) $$ 两边求导: $$ {Q_2}'(x) = c[2(i-k)-1]\Delta{x} $$ 其中,$c$为二阶差分,但是二阶差分有两个,用哪一个呢?前面说过了:这取决于哪边的光滑……感觉好奇怪,但是情况就是这么个情况: $$c=\left\{ \begin{aligned} D^2_k\phi &\qquad& |{D^2_k\phi}| < |D^2_{k+1}\phi| \\ D^2_{k+1}\phi &\qquad& |{D^2_k\phi}| > |D^2_{k+1}\phi| \end{aligned} \right.$$ 可以看出来,上面所谓“从$k=i-1$侧”开始,其实是定义了一个类似程序指针的变量,定义了下面一步要计算哪一个节点的值。算完$Q_2$之后,需要再定义一个指针变量$k^*$留着后面用: $$k^*=\left\{ \begin{aligned} k-1 &\qquad& |{D^2_k\phi}| < |D^2_{k+1}\phi| \\ k &\qquad& |{D^2_k\phi}| > |D^2_{k+1}\phi| \end{aligned} \right.$$ 第三步,依葫芦画瓢,设$Q_3$的形式如下: $$ Q_3(x) = c^*(x-x_{k^*})(x-x_{k^*+1})(x-x_{k^*+2}) $$ 两边求导: $$ {Q_3}'(x) = c^*[3(i-k^*)^2-6(i-k^*)+2](\Delta{x})^2 $$ 其中: $$c*=\left\{ \begin{aligned} D^3_{k*+1/2}\phi &\qquad& |{D^3_{k*+1/2}\phi}| < |D^3_{k*+3/2}\phi| \\ D^3_{k*+3/2}\phi &\qquad& |{D^3_{k*+1/2}\phi}| > |D^3_{k*+3/2}\phi| \end{aligned} \right.$$ 至此,$Q_{1,2,3}$全部到手,可以计算$\phi^-_x$了
$\phi^+_x$的情况
只有一句:开始的时候定义$k=i$即可。
WENO格式
算法描述
ENO格式成于“essentially”精选,也缺陷于精选,因为“精选”就意味着丢弃。 例如,对于$\phi^-_{x_i}$,HJ_ENO格式使用了如下共计六个节点的数值:
$$\{{\phi_{i-3}},{\phi_{i-2}},{\phi_{i-2}},{\phi_{i}},{\phi_{i+1}},{\phi_{i+2}}\}$$
这些节点每一个都参与了计算,但是精选之后能留下来的有多少呢?
令: $$v_1=D^-{\phi_{i-2}}\qquad v_2=D^-{\phi_{i-1}}\qquad \\ v_3=D^-{\phi_{i}}\qquad v_4=D^-{\phi_{i+1}}\qquad v_5=D^-{\phi_{i+2}}\qquad$$ ENO格式的运算实质上是一个有两个分支的流程,对其整理可以发现可能的执行结果只有下面三种: $$ \begin{aligned} \phi^1_x &=& \frac{v_1}{3}-\frac{7v_2}{6}+\frac{11v_3}{6}\\ \phi^2_x &=& -\frac{v_2}{6} +\frac{5v_3}{6} + \frac{v_4}{3}\\ \phi^3_x &=& \frac{v_3}{3}+\frac{5v_4}{6}-\frac{v_5}{6} \end{aligned} $$ 两个分支下来,最后得到的只可能是这三种结果,详细的条件选择太烦,不写了,总之浪费了计算能力。 WENO格式解决这个问题的思路是:这么多点还是要的,否则不精确,但是计算结果不要丢掉,想想办法利用一下,不能减轻计算量提高点精度也是好的。于是他们做了一个加权平均,WENO之“W”即 weight 。
WENO的几个作者Chi-Wang Shu,Guang-Shan Jiang, Danping Peng,乍看都是中国人,不过署名学校是 University of California at Los Angeles以及Brown University。
对于证明细节也不细写,总之,在函数的光滑区间内,取$\omega_1 = 0.1$,$\omega_2 = 0.6$,$\omega_3 = 0.3$的时候,加权平均: $$ \phi_{x} = \omega_1\phi^1_x + \omega_2\phi^2_x + \omega_3\phi^3_x $$ 可以得到五阶精度的导数值估计。后面又有神人证明,若在每一个$\omega$上附加一项$O((\Delta{x})^2)$,即修改为$\omega_1 = 0.1 + O((\Delta{x})^2)$,$\omega_2 = 0.6 + O((\Delta{x})^2)$,$\omega_3 = 0.3 + O((\Delta{x})^2)$,精度仍然是五阶。 看起来特别简单。问题是,不光滑区间怎样处理?需要构造一种算法来调整,该算法原则如下:
- 在光滑区间内,保证$\omegas = \omega{s-origin} + O((\Delta{x})^2)$
- 在包含奇点的区间上,尽量消除包含奇点的计算模板的影响,也就相当于是自动选择三种ENO候选格式$\phi^i_x$中不受影响的那一个
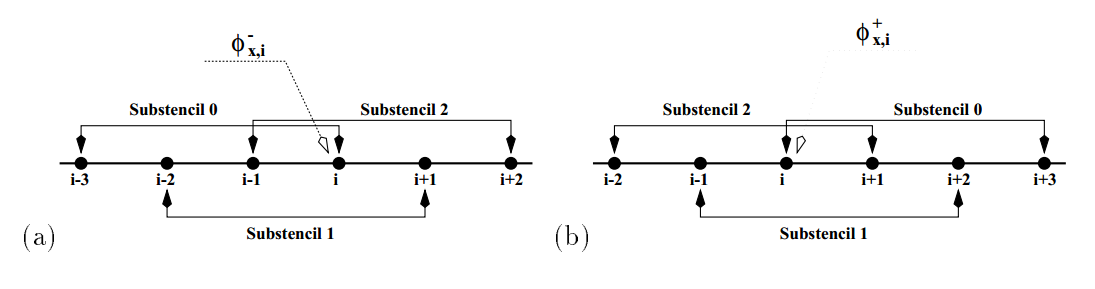
显然,核心思想还是“找最光滑的”,那么首先要知道每个模板光滑程度如何。分别定义三个模板的光滑度: $$ \begin{aligned} S_1 &=& \frac{13}{12}(v_1-2v_2+v_3)^2 + \frac{1}{4}(v_1-4v_2+3v_3)\\ S_2 &=& \frac{13}{12}(v_2-2v_3+v_4)^2 + \frac{1}{4}(v_2-v_4)\\ S_3 &=& \frac{13}{12}(v_3-2v_4+v_5)^2 + \frac{1}{4}(3v_3-4v_4+v_5) \end{aligned} $$ 继续定义,中间变量: $$ \begin{aligned} \alpha_1 &=& \frac{0.1}{(S_1 + \epsilon)^2}\\ \alpha_2 &=& \frac{0.6}{(S_1 + \epsilon)^2}\\ \alpha_3 &=& \frac{0.3}{(S_1 + \epsilon)^2} \end{aligned} $$ 其中$\epsilon$的存在是为了防止出现被零除,其定义为: $$ \epsilon = 10^{-6}max \left\{ (v_1)^2,(v_2)^2,(v_3)^2,(v_4)^2,(v_5)^2 \right\} +10^{-99} $$ 现在,可以计算得到新的$\omega_i$: $$ \begin{aligned} \omega_1 &=& \frac{\alpha_1}{\alpha_1 + \alpha_2 + \alpha_3}\\ \omega_2 &=& \frac{\alpha_2}{\alpha_1 + \alpha_2 + \alpha_3}\\ \omega_3 &=& \frac{\alpha_3}{\alpha_1 + \alpha_2 + \alpha_3} \end{aligned} $$ 用这个加权平均即可。WENO格式除初始化(选择 $\phi^+_x$或者 $\phi^-_x$ )以外,没有出现分支,一则不浪费计算能力,二则便于GPU并行化计算(GPU计算在某些时候需要尽量避免程序分支)。 最后,上面计算的都是$\phi^-_x$,对于$\phi^-_x$,将$v_i$定义的网格点向正方形平移即可,如图:
算例结果
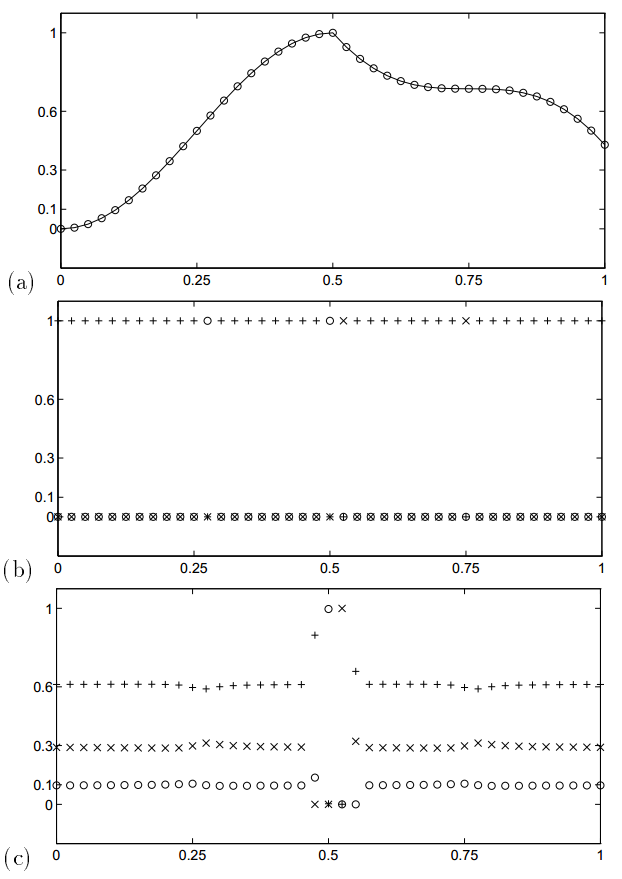
如图,(a)图为函数图像,(b)图为ENO的“权重取值”,只有0和1,因为ENO格式只取一个,©图为WENO算法下的权重。后面两图中,○+×分别代表123项的权重。可以看出,在多数情况下,WENO的权重很接近0.1、0.6、0.3,但是在接近奇点处会自动调整为更合适的值,保证数值计算的稳定性。